
Taser M26 Andros Mark Vi-a Project Chandler Pd Robot
Download original document:
Document text
Document text
This text is machine-read, and may contain errors. Check the original document to verify accuracy.
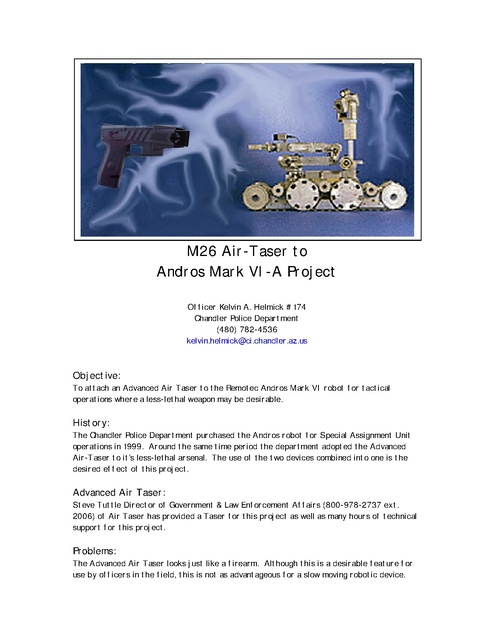
M26 Air-Taser to Andros Mark VI-A Project Officer Kelvin A. Helmick #174 Chandler Police Department (480) 782-4536 kelvin.helmick@ci.chandler.az.us Objective: To attach an Advanced Air Taser to the Remotec Andros Mark VI robot for tactical operations where a less-lethal weapon may be desirable. History: The Chandler Police Department purchased the Andros robot for Special Assignment Unit operations in 1999. Around the same time period the department adopted the Advanced Air-Taser to it’s less-lethal arsenal. The use of the two devices combined into one is the desired effect of this project. Advanced Air Taser: Steve Tuttle Director of Government & Law Enforcement Affairs (800-978-2737 ext. 2006) of Air Taser has provided a Taser for this project as well as many hours of technical support for this project. Problems: The Advanced Air Taser looks just like a firearm. Although this is a desirable feature for use by officers in the field, this is not as advantageous for a slow moving robotic device. Because the robot is slow to move about and manipulate the arms, it would be difficult to aim and fire a weapon which outwardly appeared as such towards a reluctant suspect. Solutions: The easiest solution would be change the appearance or hide the weapon entirely on the chassis of the robot. Since the arm of the robot has the most amount of articulation the most logical place to mount a weapon is on the arm. This provides a small space for mounting items. Additionally, the arm is the only portion of the robot that would allow the weapon to be properly aimed. The following solution is offered as a way to both mount the Taser on the arm of the robot and wire the unit into the existing wiring and controller for the robot. Step 1. The Taser must be modified to change the appearance of the weapon by cutting off the grip portion of the weapon. This will significantly alter the overall appearance of the weapon and will do away with the battery compartment of the Taser. Cutting of the case of the weapon should be done with a Dremel tool or similar tool. Care should be given to not penetrate the internal circuitry of the weapon. The edges of the cut should be sanded to remove any sharp edges. Figure 1 – Proposed location to cut the Air-Taser. Step 2. Once the weapon has been cut, attachments should be made to the power connection inside the weapon itself. As you look at the inside of the weapon, you’ll see two power connectors. The forward most connector, that is the connection which is closest to the trigger will be the negative contact. The rear most connector is the positive. Connections will have to be soldered to the inside of handle. Tin the wires before so as to reduce the amount of time required to solder. Overheating the connection may Figure 2 – Indicates the connections to be made to the Air-Taser. Battery pack wires must be soldered. damage the weapon. The attached schematics indicates red and black wires to these two connections. The red should be soldered to the rear most contact, while the black will be soldered to the front. Figure 3 – Depicting the location of the RJ11 jack and pin configuration. Step 3. Step 4. Remove the rubber plug from the back of the M-26. This is where your connections will be made to turn on the unit, to include the laser, as well as fire the weapon. So as to not tamper with the internal workings of the Taser, connection will be made with a RJ11 jack (available at most electronic stores). Obtain a “Cannon” plug. These are available through many suppliers on the internet or contact Remotec, specify connector P32 Weapons Plug. This is a 19 pin Figure 4 – Shows the pin-outs of the connector. connector. Figure 5 – The “P-32” plug. Step 5. Because of the differences between the weapon and the robot, coupling the two systems will require the use of two relays. One relay with coils rated at 5 volts of continuous duty and the other rated at 24 volts. These two relays will have to be integrated into both the robot and the weapon. Figure 6 – The connections between the robot and the Air-Taser. Step 6. Step 7. Once the wiring connections are made to both devices, the relays should be encased in some sort of enclosure. Wires should be wrapped in heat shrink and strain relief’s should be applied where applicable. Mounting the Taser directly to the arm of the robot is not advisable since this will limit the availability of other weapons should the need arise. Mounting the Taser in conjunction with other weapons is not possible since the Taser will occupy the weapons plug on the arm. The logical choice then is to mount the Taser on the searchlight. The searchlight does not use the weapons plug, it uses the external jacks on the left side of the arm of the robot. The mount for the searchlight is also large enough to accommodate hiding the Taser underneath the mount. Figure 7 – The searchlight for the robot. Step 8. Remove the spotlight and battery from the mounting bar. Machine two ¼ inch slots in the frame of mount about halfway between the front of the mount and the light. You will need to allow clearance for the bolt that protrudes through the bottom of the mount from the lamp. ABS, Kydex, or similar type of plastic will have to be molded to wrap around the weapon. This will serve for two functions. First to insulate the weapon from the framework of the light mount, the second to hide the weapon. The plastic should have two slots comparable to those made in the mount. The weapon will be secured to the mount utilizing a automotive hose clamp. The clamp will go through the trigger guard and over the top of the weapon, through the Figure 8 – Order of installation of parts to be installed with hose clamp. plastic, the light mount and back down the other side. Conclusion: Although this project is still in the planning phases, the overall outcome may achieve the desired effect.